Projekt Lynx
Auf dieser Seite können Sie sich interaktiv unseren Roboter anschauen und mehr über die eingebauten Sensoren und Komponenten erfahren.


Zusätzlich wird es einen Aufbau geben, wo wir unsere Sensoren wettergeshützt unterbringen können. Auf der Vorderseite wird ein hydraulischs Schneeschild angebracht.
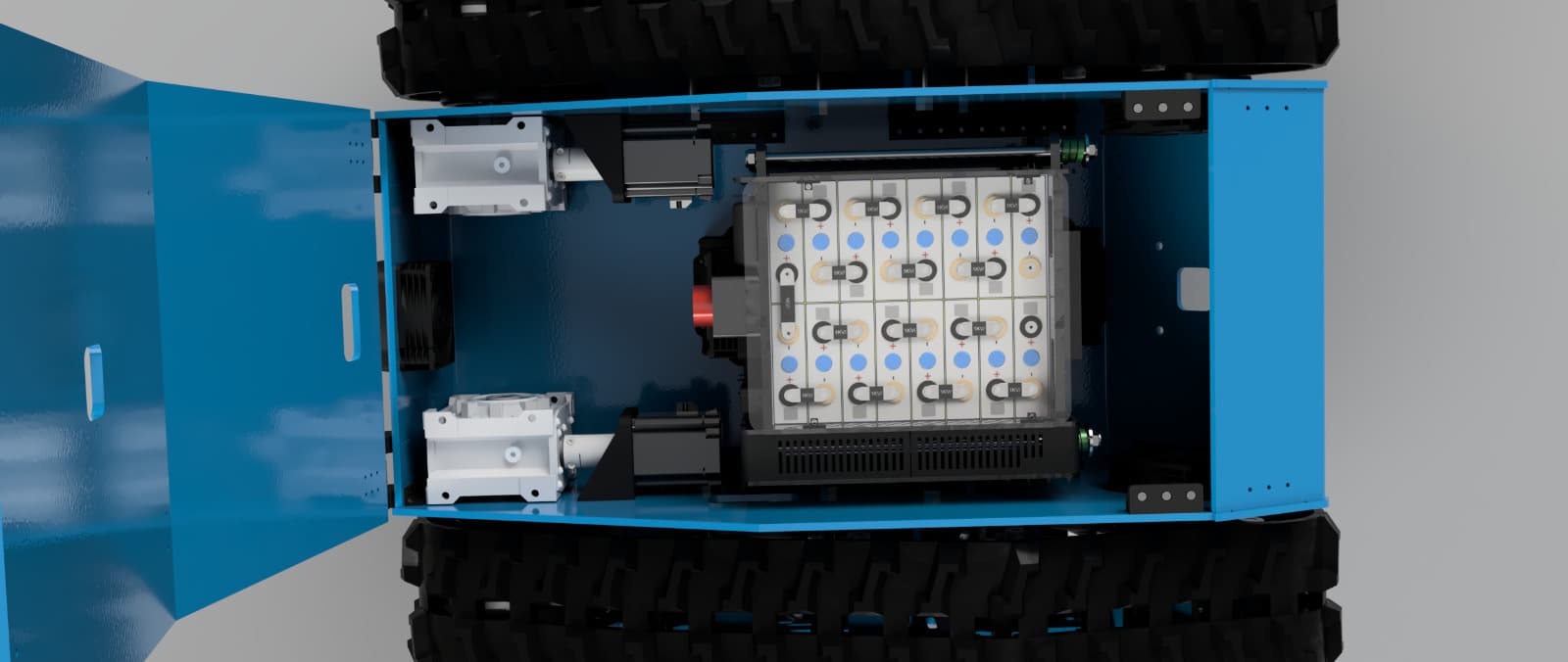
Energieversorgung
Das komplette Akkumodul wurde von unserem Team entwickelt und hergestellt.
Technische Daten (berechnet):
- 16 LiFePO4 Zellen
- 16S1P Schaltung
- 5,376kWh – entspricht der 290-Fachen gespeicherten Energie eines typischen Smartphone Akkus
- Entladeleistung dauerhaft: 5,3kW
- Peakleistung: über 10kW
- Theoretische Ladeleistung: 5,3kW
- Praktische Ladeleistung: 1,46kW (begrenzt durch Ladegerät)
- Max. Packspannung: 58,4V
- Nennspannung: 51,2V
- Gewicht: ca. 50kg
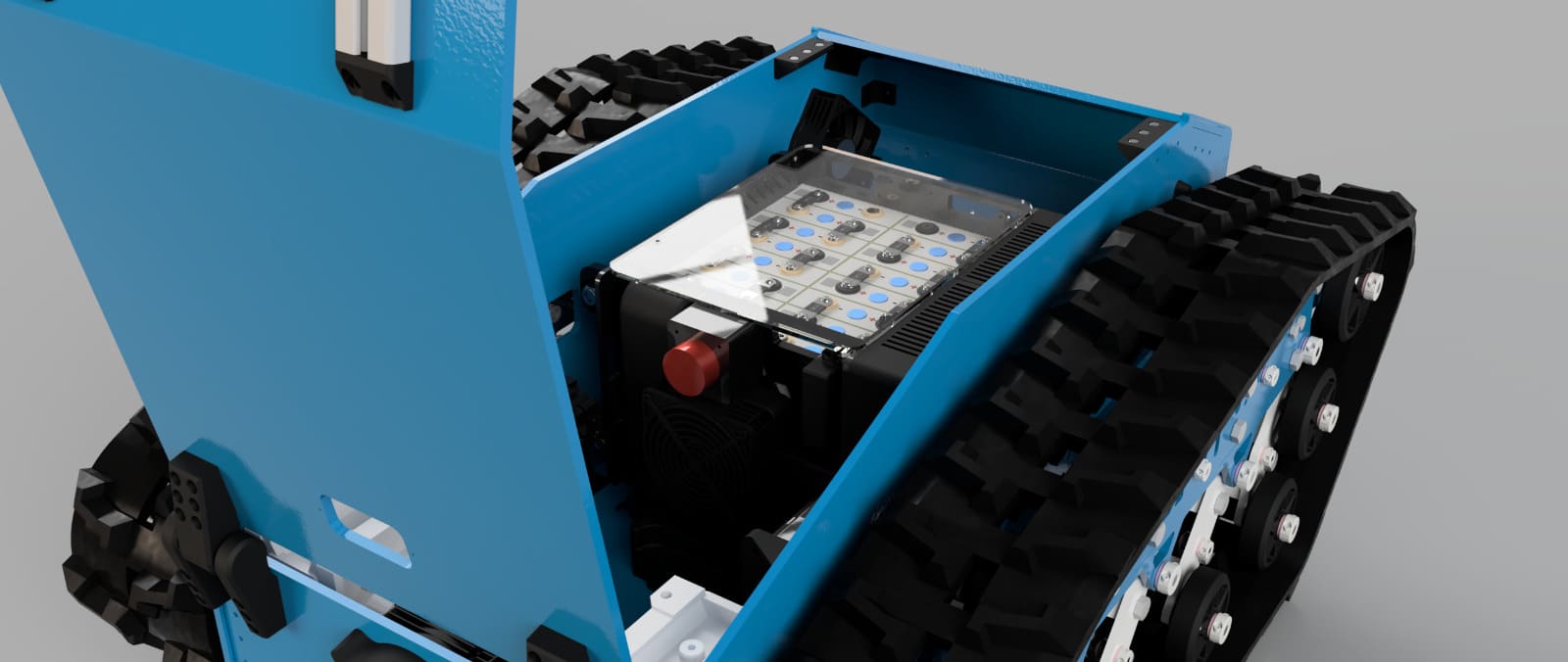
- Aktive Verpannung der Zellen für einen optimalen dauerhaften Druck
Zusätzliche Features:
- Aktive smarte Belüftung mit bis zu 10.000 Umdrehungen pro Minute
- Wärmeableitung durch Wärmepads auf das Stahlgehäuse
- Stabiles Gehäuse aus bis zu 10mm dickem Stahlblech
- Klare Sicht auf Zellen als auch Technik durch Acrylglas
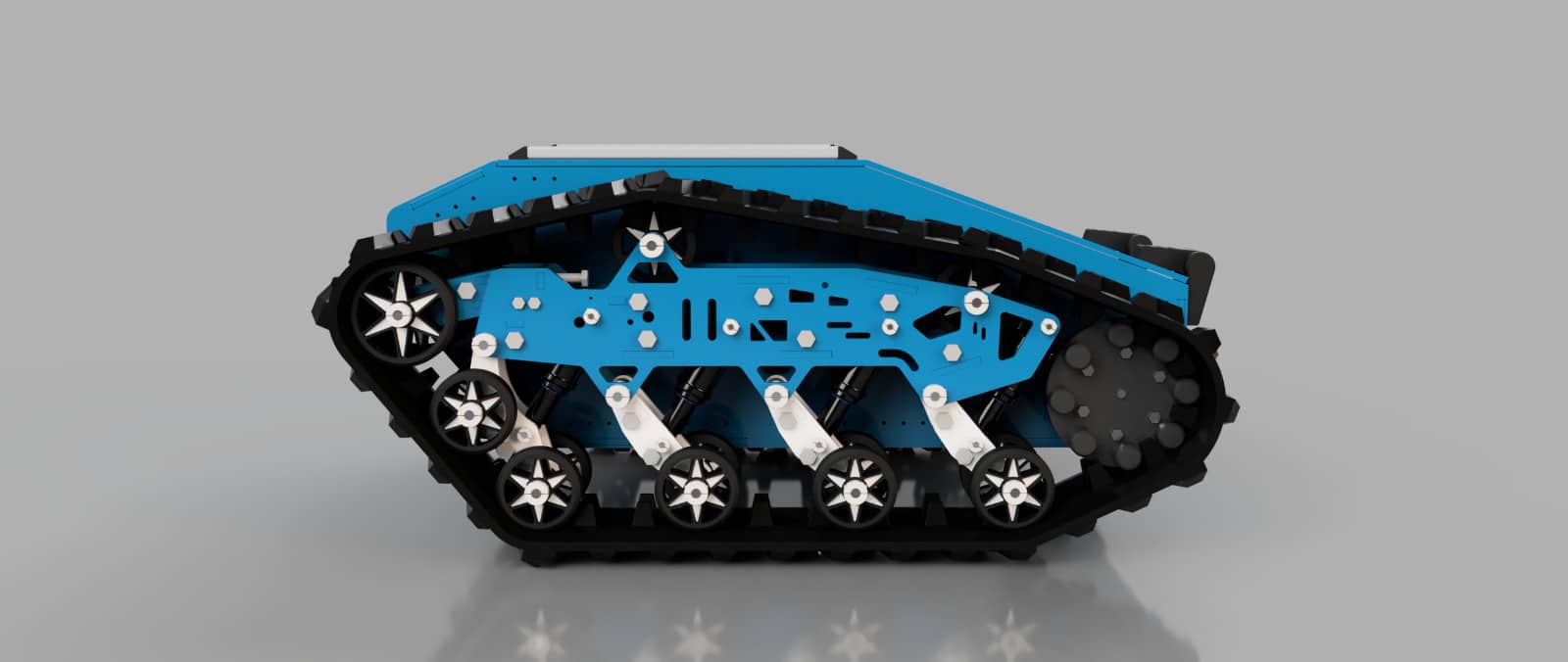
- In 360° rollbar
- Zusätzliche Isolierung der Zellen gegeneinander und gegenüber dem Gehäuse
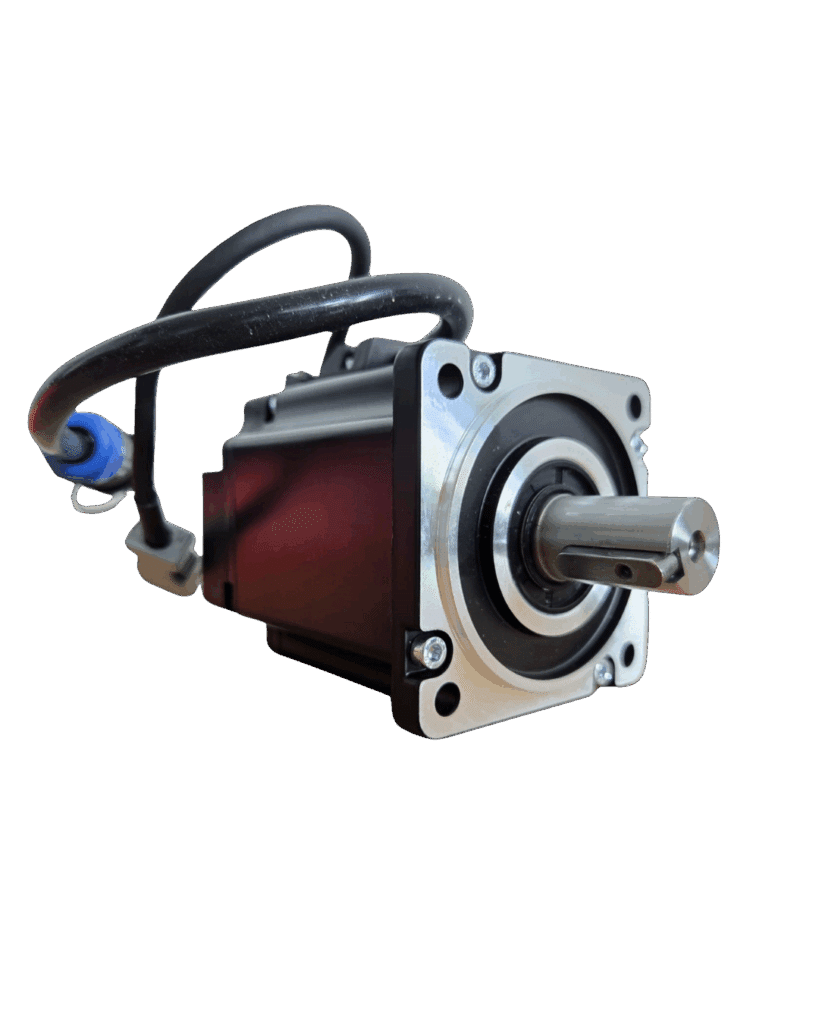
Antrieb
Motoren
Wir benutzten zwei DC-Servomotoren
Technische Daten (laut Hersteller):
- Nennleistung: 750W
- Nennspannung: 48VDC
- Nenndrehmoment: 2,39Nm
- Spitzendrehmoment: 7,17Nm
- Nennstrom: 18,5A
- Nenndrehzahl: 3000rpm
- Drehmomentkonstant: 0,129Nm/A
- Leitungs-Leitungswiderstand: 0,11ohms ± 10%
- Leitungs-Leitungsinduktivität: 0,43mH ± 20%
- Trägheit: 1,42kg*m2*10-4
- Encoder: 17-Bit-Singleturn-Magnetinkrementalgeber
- Pole: 10
- IP-Schutzart: IP65
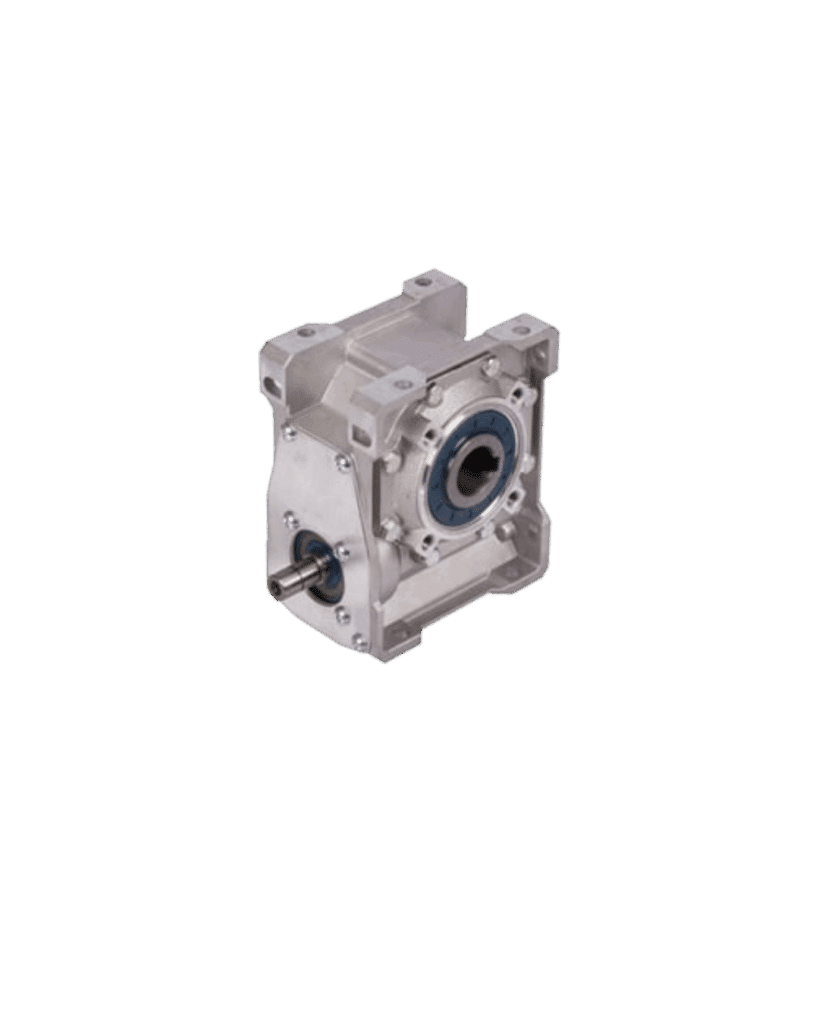
Schneckengetriebe von Mädler
H/I, bis 226 Nm, i=7,5:1 bis 100:1
Gehäuse: Aluminium-Druckguss. An der Antriebsseite und beiden Abtriebsseiten mit Befestigungsgewinden. An allen anderen Seiten mit Befestigungslöchern. Schneckenwelle: Gehärtet und geschliffen. Schneckenrad: Bronze auf Grauguss-Nabe. Schmierung: Synthetisches Öl (Lebensdauerfüllung). Leichte, qualitativ hochwertige Baureihe in 5 Baugrößen: Achsabstand 31.5, 40, 50, 63 und 75 mm. Die Getriebe sind ohne Entlüftung und baulage-unabhängig einsetzbar. Abtriebswelle einsteckbar: Die Getriebe sind in der Grundausführung Hohlwellen-Getriebe.
(c) MÄDLER
Mehr Informationen zum Getriebe finden Sie hier.
Schaufel
Die Schaufel wird Mitte August hochgeladen.
Sensoren
µIMU IC von LITEF
An einem frei beweglichen Objekt befestigt,
misst die MEMS-basierte µIMU-IC von LITEF die Orientierung, Richtung und Geschwindigkeit in Echtzeit.
Dadurch kann unser Roboter genau überwacht werden, um eine präzise Bewegungssteuerung zu ermöglichen. Die µIMU-IC ist besonders geeignet für anspruchsvolle Anwendungen mit schnell wechselnden Umgebungsbedingungen, wie diese auf der Snow Plow Competition.
Technische Daten:
Die können hier entnommen werden.
Die MEMS-basierte µIMU ist eine vollständige inertiale Messeinheit und besteht aus drei MEMS-Drehratensensoren, drei MEMS-Beschleunigungsmessern, der zugehörigen Elektronik und der Stromversorgung in einem hermetisch abgeschlossenen, robusten Gehäuse. Mit ihrer geringen Baugröße, der einfach zu integrierenden Schnittstelle sowie den exzellenten Leistungsdaten ist die µIMU die perfekte Messeinheit für alle Anwendungen wie Lage-Referenzsysteme und Stabilisierungssysteme sowie für die Stabilisierung von Kameras, Antennen und anderen Instrumenten auf bewegten Plattformen.
(c) LITEF

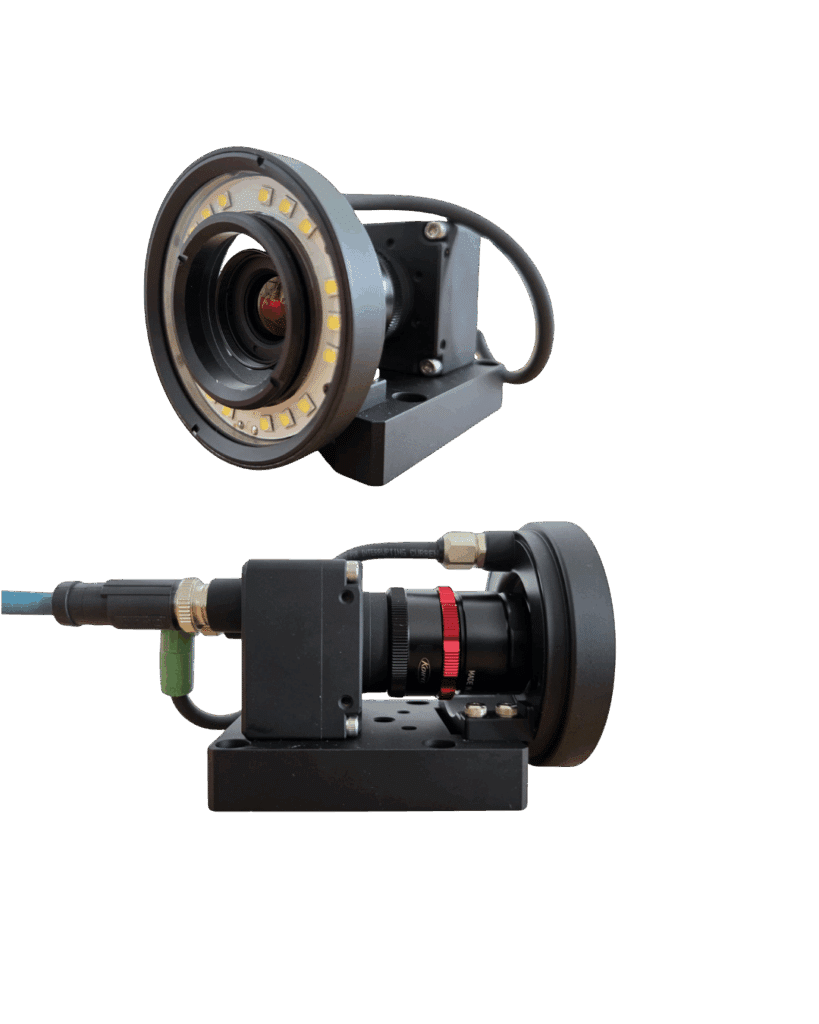
RGB-Kamera mit Objektiv von Kowa
Die KC300GC3CX Kamera:
Die 3MP Farbkamera mit wasserdichtem (IP67), staubdichtem, ölbeständigem, stoß- und vibrationsfestem Gehäuse.
Gebaut für raue Umgebungen in der industriellen Bildverarbeitung. Dieses Produkt ist eine Industriekamera, die mit einem Global Shutter, CMOS-Bildsensor und GigE-Schnittstelle ausgestattet ist. Geeignet für viele Anwendungen wie Roboter-Vision. Perfekt geeignet für extreme Umgebungen mit Feuchtigkeit, Staub oder Öl.
Das LM8JCM-WP Ruggedized Objektiv:
Das Design des Objektivs ist patentiert, hat einen 2/3″ C-mount Industrieobjektiv mit einer Brennweite von 8mm.
Geeignet füür Sensoren mit einer Pixelgröße ab 4.5μm.
Entwickelt für den Einsatz in Umgebungen mit starken Vibrationen und Stößen
Eine Kontermutter wird statt Schrauben zur Feststellung des Fokus verwendet
Alle inneren Glaselemente sind zur Erhöhung der Stabilität verklebt
In Verbindung mit geeigneter Kamera IP67 wasserfest
Technische Daten:
Kamera – diese können hier eingesehen werden.
Objektiv – diese können hier eingesehen werden.
(c) Kowa
Tiefenbildkamera
Technische Daten (laut Hersteller)
- Tiefentechnologie: Active IR Stereo
- Tiefenfilter: All-Pass
- Tiefenauflösung: bis zu 1280 × 720 Pixel
Bildrate (Tiefe): bis zu 90 Bilder/Sekunde
Optimale - Arbeitstiefe: 0,6 m – 6 m
- Mindest-Abstand: ca. 0,52 m
- Tiefengenauigkeit: < 2% bei 4 m
- Sichtfeld (Tiefe): 87° × 58°
- RGB-Auflösung: bis zu 1280 × 800 Pixel
- Bildrate (RGB): bis zu 30 Bilder/Sekunde
- Sichtfeld (RGB): 90° × 65°
- Sensoren: 3 × Global
- Schnittstelle: USB 3.1
- Typ-C
- Schutzklasse: IP65

LiDAR
Technische Daten (laut Hersteller)
Scanbereich: 360°, 2D
Maximale Reichweite: 30 m (bei weißen Objekten)
Reichweite (schwarze Objekte): ≥10 m
Blindbereich: 0,05 m
Messgenauigkeit: ±30 mm
Distanzauflösung: 13 mm
Abtastrate: 32.000 Messungen/Sekunde
Scanfrequenz: 8–15 Hz (typisch 10 Hz)
Wellenlänge: 905 nm
Laserklasse: Klasse 1 (Auge sicher)
Schnittstellen: UART, USB Adapter
Versorgungsspannung: 5 V
Stromaufnahme: <2,5 W
Schutzklasse: IP65
GNSS Antenne und Basisstation
Antennenelement
- Unterstützte Positionssignalbänder:
GPS: L1, L2
GLONASS: G1, G2
BeiDou: B1, B2
Galileo: E1, E5b
QZSS: L1, L2
SBAS: WAAS, EGNOS, MSAS und GAGAN - Frequenzbereich:
1559–1606 MHz
1197–1249 MHz - Polarisation: RHCP (Rechtsdrehende zirkulare Polarisation)
Spitzenverstärkung: 2,0 dBi (ohne Grundplatte)
Axialverhältnis am Zenit: < 3 dB
Azimut-Abdeckung: 360 Grad
Durchschnittlicher LNA-Verstärkungsfaktor: 28 dB
Maximale Rauschzahl: 3,2 dB
Maximales VSWR: 2
Schutzklasse: IP67
GNSS-Modul
- Präzision auf Zentimeterebene
< 1 cm mit Basisstation bis zu 35 km Entfernung
< 1 cm mit NTRIP bis zu 35 km
< 4 cm mit SSR-Korrekturen
< 1,5 m im Standalone-Betrieb
< 0,9 m Standalone mit SBAS-Abdeckung - Aktualisierungsrate: Standard: 1 Hz
Maximale Leistung: bis zu 10 Hz
Mit reduzierter Leistung: bis zu 20 Hz - Multiband: Unterstützt L1, L2 und E5b
Multifrequenz- und Multikonstellationsbetrieb:
GPS: L1C/A, L2C
GLONASS: L1OF, L2OF
Galileo: E1-B/C, E5b
BeiDou: B1I, B2I
QZSS: L1C/A, L2C
SBAS: WAAS, EGNOS, MSAS, GAGAN, SouthPAN - Startzeiten:
Erste Positionsbestimmung: 25 Sekunden (kalter Start), 2 Sekunden (warmer Start)
Erster RTK-Fix: 35 Sekunden (kalter Start)
Datenausgabe: Rohdaten im UBX-Format - Basis- und Rover-Funktion
Rechenkomponenten
Zentrale Recheneinheit
Jetson Orin NX
- KI-Leistung: bis zu 70 TOPS (Tera Operations Per Second) bei konfigurierbarer
- Leistungsaufnahme von 10 bis 20 Watt
- GPU: NVIDIA Ampere-Architektur mit 1024 CUDA-Kernen und 32 Tensor-Kernen
- CPU: 6-Kern ARM Cortex-A78AE 64-Bit CPU mit max. 2 GHz Taktfrequenz
- Deep Learning Beschleuniger (DLA): 1x NVDLA v2
Vision-Beschleuniger: 1x PVA v2 (Programmable Vision Accelerator) - Arbeitsspeicher: 8 GB 128-Bit LPDDR5 RAM mit 102,4 GB/s Bandbreite
- Videospeicher: 8GB LPDDR5, 128-Bit, 102,4 GB/s
- Videoschnittstellen: Unterstützt 1080p Video-Decodierung in mehreren Streams (z.B. 18 HD-Streams bei 30 FPS)
- Speicher: Extern erweitert – SSD 500GB bis 6.600 MB/s