Herzlich willkommen im ARTUS Blog! Nachdem wir unseren Verein im Jahr 2024 ins Leben gerufen haben, war unser Ziel von Anfang an klar definiert: die Teilnahme an der Autonomous Snowplow Competition (ASPC). Dahinter steckt unser autonomer Schneepflug Lynx – ein ambitioniertes Projekt, das uns von der reinen Theorie an der Universität Stuttgart in die aufregende Praxis der Robotik katapultiert hat.
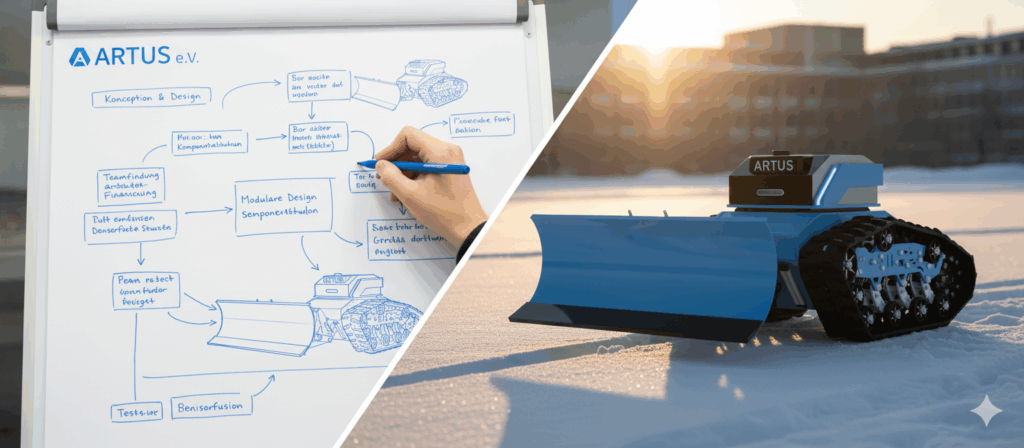
Doch wie kommt man von einer Idee auf dem Whiteboard zu einem funktionsfähigen, autonomen Kettenfahrzeug? Hier nehmen wir euch mit hinter die Kulissen der Entwicklung und teilen unsere größten Herausforderungen und Meilensteine.
1. Das Team formen und die Finanzierung sichern
Bevor auch nur die erste Schraube gedreht werden konnte, standen wir vor zwei elementaren Knackpunkten: Teamfindung und Finanzierung.
Ein interdisziplinäres Projekt wie unseres erfordert nicht nur Expertise, sondern vor allem Engagement. Es war eine Herausforderung, die richtigen Leute in die passenden Untergruppen (Mechanik, Elektronik, Software, PR) zu bringen und sicherzustellen, dass jeder bereit war, die notwendige Zeit zu investieren und sich in neue Themengebiete einzuarbeiten.
Gleichzeitig verschlang die Entwicklung eines Roboters in dieser Größenordnung erhebliche Geldsummen für Komponenten. In einem schwierigen Marktumfeld mussten wir kreativ werden. Unser Glück: Wir konnten uns bei einer Ausschreibung des Landes die notwendigen Mittel für die Entwicklung sichern. Zudem haben uns einige Unternehmen durch Materialspenden und Leihgaben, wie z.B. von unserem Sponsor Mädler, tatkräftig unterstützt.
2. Analyse, Design und die „deutsche Overkill-Lösung“
Um eine fundierte Basis zu schaffen, haben wir uns intensiv mit der Materie auseinandergesetzt. Wir wälzten Vorlesungsskripte, analysierten die Konzepte der Konkurrenz bei der ASPC und studierten Industrielösungen. Die daraus gewonnenen Erkenntnisse führten zu zwei entscheidenden Design-Entscheidungen:
A. Der Raupenantrieb: Traktion vor Simplizität
Viele Wettbewerbsteilnehmer setzen auf den einfacheren und effizienteren Radantrieb. Wir entschieden uns bewusst für einen Raupenantrieb. Warum?
Auf rutschigem Untergrund wie Schnee kämpfen Radantriebe häufig mit Traktionsproblemen und müssen durch Zusatzgewichte stabilisiert werden. Wir wollten dem sprichwörtlichen „deutschen Overkill“ folgen und eine robuste Lösung entwickeln, die uns auch in Sachen Traktion Vorteile bietet. Der Raupenantrieb stellte zwar eine höhere technische Herausforderung dar, bietet aber auch langfristige Vorteile für andere Anwendungsbereiche.
B. Das Modulare Design: Lynx als Universal-Plattform
Uns war es wichtig, dass Lynx mehr als nur ein Schneepflug ist. Deshalb setzen wir auf ein modulares Design. Ziel ist es, langfristig eine universelle Plattform zu schaffen, die schnell mit verschiedenen Modulen für unterschiedliche Aufgaben bestückt werden kann.
In Zukunft planen wir mit einheitlichen Stecksystemen und Schnellaufnahmen, um den Modulwechsel zum Kinderspiel zu machen. Eine ausgereifte Software soll die Module automatisch erkennen.
3. Die Hürden des Eigenentwurfs und die Sache mit den Maßen
Anfangs zogen wir in Erwägung, auf eine fertige Industrielösung zu setzen und uns nur auf die Navigations-Software zu konzentrieren. Doch wir erkannten schnell die damit verbundenen Design- und Feature-Einschränkungen. So wagten wir den Schritt zum vollständigen Eigenentwurf der Hardware – ein aufregendes, wenn auch herausforderndes Unterfangen, das uns unzählige Erkenntnisse lieferte.
Die größte Hürde war dabei die völlige Freiheit im Design: Es gab kaum einschränkende Leitlinien, was die Entscheidungsfindung komplex machte. Hinzu kam das Risiko bei der Komponentenauswahl. Ein Beispiel gefällig? Bei der Bestellung von Rollen waren wir uns unsicher, ob eine einzelne, kritische Online-Rezension bezüglich abweichender Maße Recht behalten würde. Spoiler: Sie hatte Recht. Die Maße von online bestellten Komponenten entsprechen leider nicht immer der Realität – ein wichtiger Lerneffekt beim Bau von Prototypen!
4. Die großen Momente: Von Blech zur Bewegung
Trotz aller Herausforderungen sind es die Meilensteine, die das Team zusammenschweißen und motivieren:
- Das Ankommen der ersten Bleche: Plötzlich wurden die CAD-Abmessungen real. Was in der Software groß oder klein erschien, manifestierte sich plötzlich in echten Dimensionen.
- Der lackierte Zusammenbau: Ein beeindruckender Moment, in dem die Mühe sichtbar wurde. Es ist erstaunlich, wie viel Farbe bewirken kann!
- Die ersten Motor- und Fahrtests: Die größten Highlights bisher. Tief in der Nacht die ersten Bewegungen der Ketten zu sehen und Lynx das erste Mal vollständig fahren zu lassen, war ein unvergessliches Gefühl.
Der nächste große Meilenstein steht bereits vor der Tür: Die erste autonome Fahrt! Wir können es kaum erwarten, euch bald davon zu berichten.
🎓 Unser größter Tipp an alle Studierenden-Projekte
hr werdet Fehler machen – und das ist gut so!
Das Wichtigste ist, Lust auf das Thema zu haben und bereit zu sein, Zeit zu investieren, denn es wird nie alles nach Plan laufen. Informiert euch gut über den aktuellen Stand der Technik, aber verliert euch nicht zu lange in der Theorie. Irgendwann muss man einfach anfangen.
Traut euch! Es wird Tiefen und Höhen geben, aber beides gehört zur Entwicklung dazu. Wir bereuen den Schritt in den Eigenentwurf nicht und hoffen, bald auch euch bei einem Wettbewerb zu treffen.